Lancelot Tan
Portfolio: lancelot38.com | Email: yt2979@nyu.edu
EDUCATION
University of New York
Sep 2024 – Jun 2026
* M.S. in Electrical and Computer Engineering with Computer Engineering from New York University, GPA: 3.89/4.0
University of Electronic Science and Technology of China (UESTC)
Sep 2020 – Jun 2024
* B.E. in Electronics and Electrical Engineering with Communications Engineering from University of Glasgow;
* B.E. in Electronics and Electrical Engineering with Communications Engineering from UESTC; GPA: 3.5/4.0
PROFESSIONAL EXPERIENCE
Verisilicon Microelectronices (Chengdu) Co., Ltd.| FPGA Test Engineer Intern
Mar 2024 – May 2024
* Set up personal development environments in Linux, wrote Bash scripts for compiling drivers, mounted them, and loaded bitstream files onto FPGA boards
* Ran test cases on FPGA boards, collected results, compared with golden values, and identifying mismatched cases
* Innovatively developed an integrated script that automates driver compilation, driver mounting, test case execution, and result collection, significantly improving workflow efficiency
* Gained in-depth understanding of project lifecycle processes across roles and departments, facilitating smooth coordination and documented workflows and verification procedures
Sichuan Branch, China Mobile | Network Construction & Maintenance Intern
Jul 2023 – Aug 2023
* Acquired expertise in fusing network cables and optical fiber sheaths, as well as configuring mobile network devices such as routers. Provided free optical fiber access and installed digital TVs for elderly residents in old neighborhoods
* Contributed to the planning and optimization of the mobile network in Wuhou District to enhance performance and coverage. Ensured 100% operational efficiency of network devices during the FISU World University Games 2023
PROJECT EXPERIENCES
Feb 2025 – Mar 2025
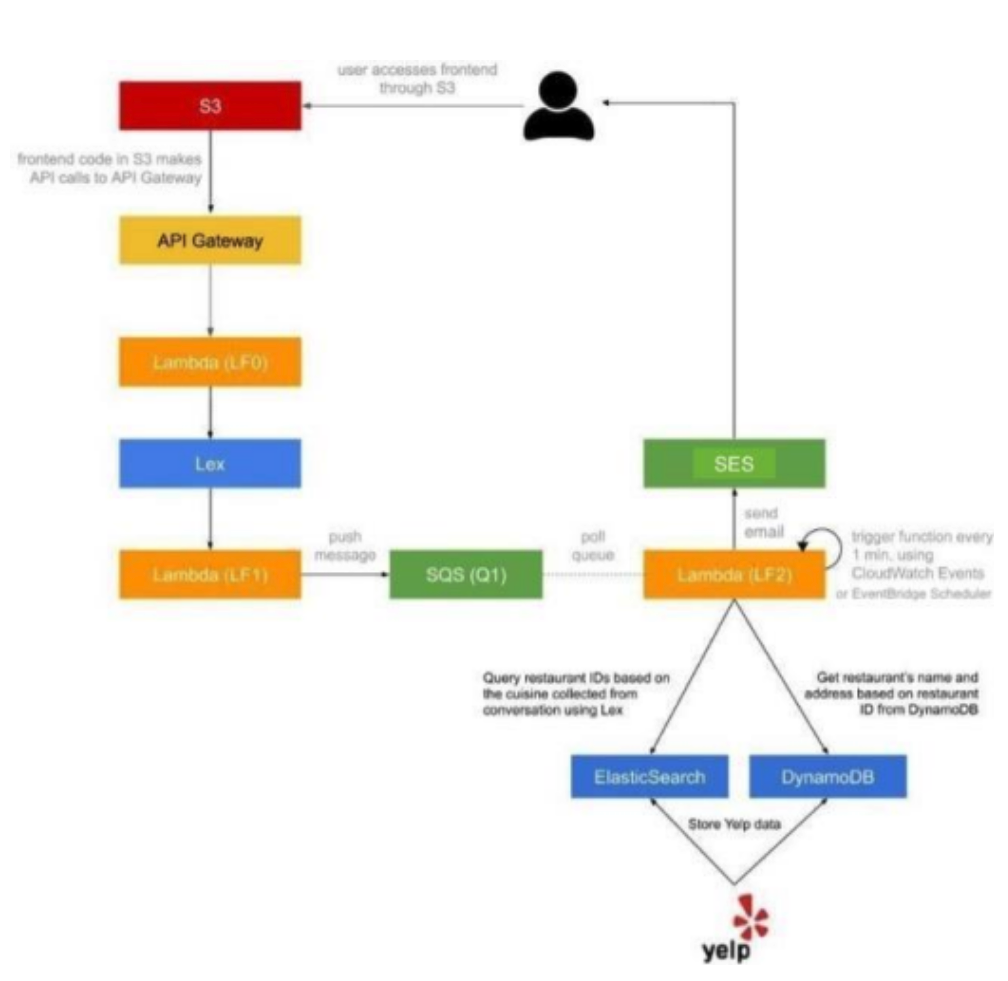
* Built a serverless AI-powered chatbot using AWS Lex, Lambda, and API Gateway, enabling users to receive personalized restaurant recommendations.
* Integrated Yelp API, storing and querying 5,000+ restaurants efficiently with DynamoDB and Elasticsearch for real-time suggestions.
* Designed a React-based frontend hosted on AWS S3, with asynchronous SQS-based message handling and email notifications via SES.
Sep 2024 – Jan 2025
* Implemented high-performance multithreading using ExecutorService, enabling efficient concurrent web crawling and significantly reducing processing time
* Developed an interactive GUI in Java Swing, presenting crawled data in a hierarchical tree structure with MySQL database, enhancing user navigation and data visualization
Sep 2024 – Jan 2025
* Developed a high-performance cycle-accurate simulator for a 32-bit RISC-V processor, supporting both single-cycle execution and a five-stage pipeline.
* Implemented efficient pipeline hazard resolution: Forwarding to minimize RAW dependencies and Speculative execution for control hazard handling.
* Optimized pipeline performance, achieving a 30% reduction in CPI compared to the single-stage processor.
* Built performance monitoring tools to measure execution metrics (CPI, IPC, total cycles), enabling in-depth architectural comparisons.
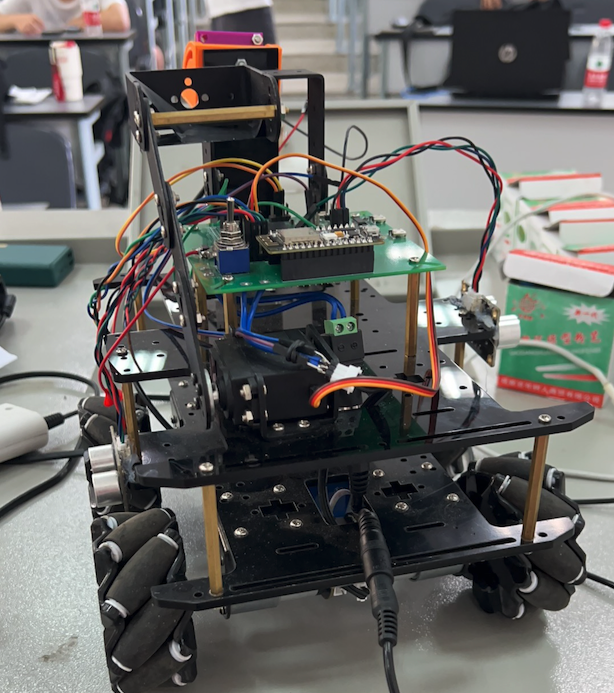
Intelligent Robot Design Project
Mar 2023 – Jun 2023
* Experimented with infrared sensors, OpenMV grayscale pathfinding, Canny edge detection to enhance performance, developed a CNN model for image recognition and algorithms for road tracking
* Applied Mecanum wheels and an M-point Moving Average Filter to reduce ultrasonic noise jitter and improve task accuracy; implemented wireless communication using the HC-12 module
Jun 2022 – Sep 2022
* Constructed a convolutional neural network (CNN) model based on TensorFlow capable of automatically identifying pneumonia images that achieved the accuracy rate by up to 93%, and was awarded as “the winning group”
RL-based Self-organizing and Self-understanding Wireless Communication Network
Jul 2022 – Jun 2023
* Conduct a thorough review of communication protocols used in ad-hoc networks, such as DSDV, AODV, and DSR, to integrate components which are suitable for a self-organizing network
* Build a simulation environment in ns-3 to emulate a highly dynamic network, formulate the problem to be an RL-based optimization by defining the action and state spaces for the network nodes
Aug 2021 – Oct 2022
* Led a team of 3 to design and develop a product demo app based on HarmonyOS for Dalang Industrial Company
* Learned and practiced Java and HTML programming in DevEco Studio for frontend development and proposed to deploy data processing to the cloud, improving the processing efficiency; with a computer software copyright
Robot Printer of Lego
Oct 2021 – Jan 2022
* Constructed the robot using Lego parts and designed a framework converted from text to bitmap for better robot understanding. Programmed and debugged the algorithm with Robot C, for the servo and the sensor
ADDITIONAL
Language Proficiency: Chinese: Native, English: IELTS (7)
Programming Skills: C, C++, MATLAB, Java, Python, HTML
Applications & Tools: VS (2019), LTspice XVII, DevEco Studio, Origin, Typora, Pycharm, Jupyter, Anaconda, VMware, HBuilderX, Node.js, MathType, Git, NS-3, Robot C, CLion, IntelliJ IDE, Mysql, AWS
Associations: Art Troupe of School (National first prize – The 6th National College Students’ Art Exhibition)
About ME
Analytical Thinker
Problem Solver
Detail-Oriented
More
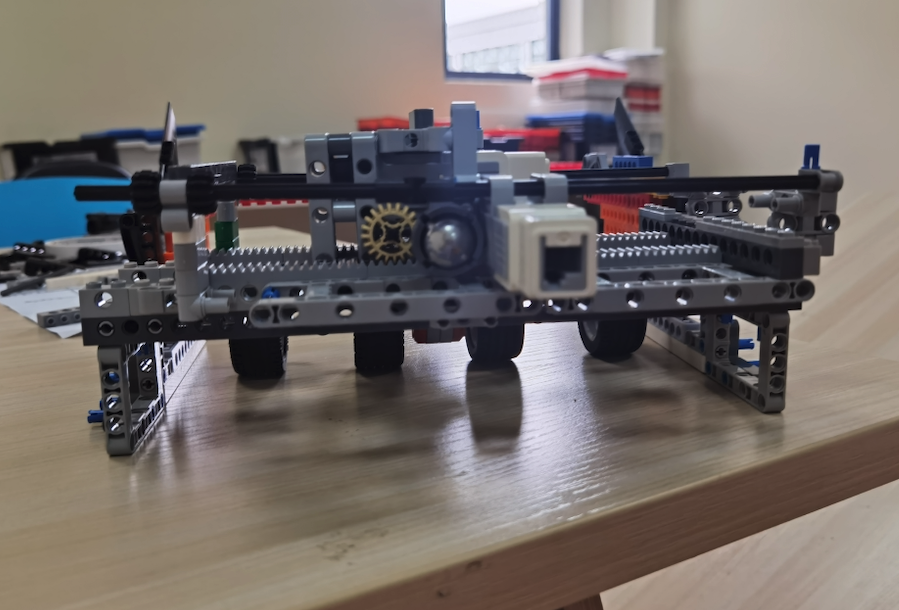

Lego Printer
Design and build a simple drawing/printing device using LEGO bricks and EV3, programmed in RobotC to control X/Y axis movement. The system is capable of accurately rendering characters and simple patterns through precise motor control and coordinated motion.
Intelligent Robot
A robot powered by STM32, equipped with OpenMV for visual tracking and HC-12 for wireless communication. It features automatic obstacle avoidance, real-time visual tracking, and long-range wireless communication, enabling intelligent navigation and remote control.
A cycle-accurate simulator for a 32-bit RISC-V processor, implementing both a single-stage processor and a five-stage pipelined processor. It y handles control hazards and Read After Write (RAW) dependencies, ensuring accurate pipeline behavior and instruction execution timing.
Click and Give it a try!!!
A serverless AI-powered chatbot using AWS Lex, Lambda, and API Gateway, enabling users to receive personalized restaurant recommendations.
MORE
1. WebCrawler
– A multithreaded web crawler in Java, stored crawled data in MySQL, and designed an interactive GUI with Java Swing
2. UserDataManager
– Designed a system to read user data from structured files (e.g., CSV), transform and store it in MySQL database, and display a control panel for managing and visualizing.